

In lots of pc imaginative and prescient functions, engineers collect knowledge manually. The Level Cloud Processing includes a set of tiny factors in 3D area, i.e. factors captured by a 3D laser scanner. Every level within the cloud incorporates wealthy data, akin to three-dimensional coordinates (x, y, z), shade data (r, g, b), floor vectors, and so on.
These knowledge signify the spatial distribution and floor traits of the goal. Handbook gathering typically results in the gathering of inaccurate or lacking knowledge, time spent on a location, and better bills for the shopper.
About us: Viso.ai offers a sturdy end-to-end pc imaginative and prescient infrastructure – Viso Suite. Our software program helps a number of main organizations begin with pc imaginative and prescient and implement deep studying fashions effectively with minimal overhead for varied downstream duties. Get a demo right here.
What are Level Clouds?
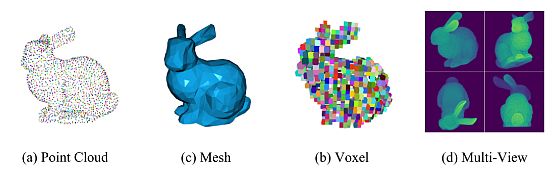
Some extent cloud knowledge is a complete digital elevation presentation of a three-dimensional object. Excessive-tech devices like 3D scanners, LiDAR, and photogrammetry software program measure the x, y, and z coordinates and seize the article’s floor. Every of those factors tells us in regards to the object’s form and construction.
E.g. when scanning a constructing, every level cloud represents an actual level on the wall, window, stairway, or any floor the laser beam meets. The scanner combines the vertical and horizontal angles created by a laser beam to calculate the x, y, and z coordinates. Every level generates a set of 3D coordinate techniques with RGB and depth knowledge.
A denser illustration with factors generates finer traits, akin to texture and tiny options. The purpose cloud incorporates tiny factors after we zoom on it. A area with extra factors will present the scanned atmosphere extra clearly.
How are Level Clouds Generated?
Level cloud creation means capturing an space by taking many level measurements utilizing a 3D laser scanner. You may rapidly construct a cloud utilizing a cell mapping machine, static-based Lidar, or cellphones empowered with Lidar level cloud.
Static Scanning
Static scanning makes use of a Terrestrial Laser Scanner (TLS) hooked up to a tripod. It generates the purpose cloud by scanning a sequence of overlapping places, making certain it covers all angles of a mapped space. Subsequently within the post-processing section, the person datasets merge to create one correct level cloud.

Cell Mapping
Cell mapping performs an analogous course of, though much less correct. Nonetheless, cell mapping conducts scans on the transfer. The scanner is mounted to a car or drone in order that cell scanning can produce higher outcomes. Subsequently, a single cloud is the results of post-processing of merging factors from a number of scans.
Level Cloud Processing Strategies
Laptop imaginative and prescient algorithms present level cloud processing functionalities that embrace: level cloud registration, form becoming to 3-D level clouds, and the power to learn, write, retailer, show, and evaluate level clouds.
Level cloud processing strategies construct a map with registered level clouds, optimize the map to right the drift, and carry out map localization. Many of those strategies make the most of deep studying and Convolutional Neural Networks (CNNs) to create level cloud processing.
Deep Studying Convolutional-Primarily based Technique
Processing irregular, unstructured level cloud knowledge stays a formidable problem, regardless of the deep studying’s success in processing structured 2D picture knowledge. Many research try to make use of three-dimensional CNNs to study the quantity illustration of three-dimensional level clouds. They’re motivated by the exceptional success of CNNs on two-dimensional photographs.
Boulch et al. (2020) proposed a generalization of discrete CNNs. They meant to course of the purpose cloud by changing discrete kernels with steady ones. This method is simple and permits the usage of variable level cloud sizes for designing neural networks just like 2D CNNs.
- They carried out experiments with a number of architectures, emphasizing the pliability of their method. They obtained aggressive outcomes in comparison with different strategies of form classification, half segmentation, and semantic segmentation (for large-scale level clouds).
- Researchers utilized the proposed community design and the code model accessible within the official PointCNN repository on the time of analysis.
- They carried out trials on the ModelNet40 classification dataset for each frameworks. Their floor mannequin performs coaching round 30% sooner than PointCNN, whereas inference speeds are comparable.
- Furthermore, the distinction was important on the ShapeNet segmentation dataset. For a batch dimension of 4, their segmentation framework was 5 occasions sooner for coaching, and three occasions sooner for testing.
GAN-based Level Cloud Processing
Generative Adversarial Networks (GAN) have demonstrated promising ends in studying various kinds of advanced knowledge distributions. Some researchers confirmed {that a} easy modification of the present GAN method is unsuitable for level clouds. The explanation for that’s the constraints of the undefined discriminator.
L. Li et al.(2018) proposed a two-fold modification of the GAN studying algorithm to course of level clouds (PC-GAN). Firstly, they adopted a hierarchical and interpretable sampling process combining ideas from implicit generative fashions and hierarchical Bayesian modeling.
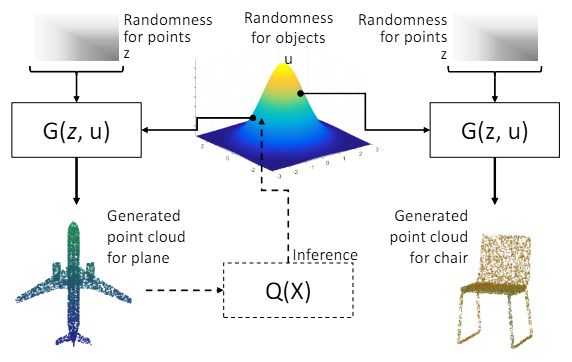
A fundamental a part of their technique is to coach a posterior inference community for the hidden variables:
- As a substitute of utilizing the brand new Wasserstein GAN goal, they proposed an intermediate goal. It resulted in a tighter Wasserstein distance estimate.
- They validated their outcomes on the ModelNet40 benchmark dataset. They found that PC-GAN educated by the intermediate goal outperforms the present strategies on check knowledge, measured by the space between generated level clouds and actual meshes.
- Furthermore, PCGAN learns adaptable latent representations of level clouds as a byproduct. Additionally, in an object identification process, it could actually outperform different unsupervised studying strategies.
- Lastly, in addition they researched producing unseen lessons of objects and reworked photographs into a degree cloud. They demonstrated the good generalization capabilities of PC-GAN.
Transformer-based Level Cloud Processing
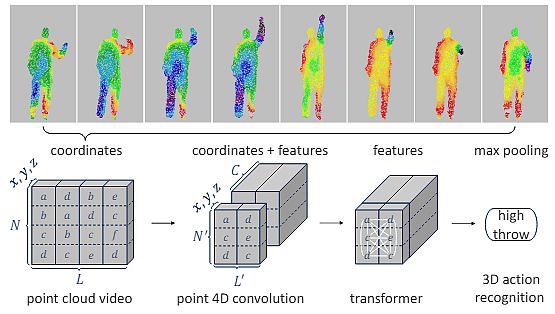
Transformer fashions have gained important curiosity in 3D level cloud processing and have demonstrated exceptional efficiency throughout various 3D duties. Fan et al. (2021) proposed a novel Level 4D Transformer community to course of uncooked level cloud movies. Particularly, their P4Transformer consists of:
(i) Level 4D convolution to embed the spatiotemporal native buildings introduced in a degree cloud video, and
(ii) Transformer to seize the looks and movement data throughout the complete video. Additionally, it performs self-attention on the embedded native options.
- They reviewed the speculation behind the transformer structure and described the event and functions of 2D and 3D transformers.
- Furthermore, the authors launched the P4Transformer encoder to compute the options of native areas by capturing long-range relationships throughout the complete video.
- They utilized P4Transformer for 3D motion recognition and 4D semantic segmentation from level clouds.
- It achieved greater outcomes than PointNet++-based strategies on many benchmarks (e.g., the MSR-Action3D).
Discovered Gridification for Level Cloud Processing
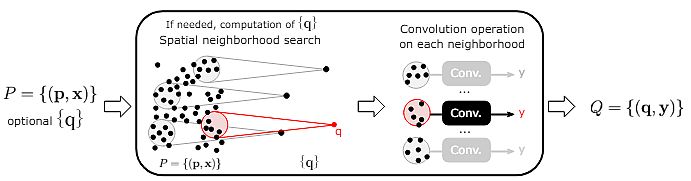
V.D. Linden et al (2023) proposed learnable gridification as step one in a degree cloud processing pipeline to rework the purpose cloud right into a compact, common grid.
To place it briefly, gridification is the method of connecting factors in a degree cloud to a variety of factors in a grid using bilateral k-nearest neighbor connectivity. Researchers carry out it through a convolutional message-passing layer working on a bipartite graph. The proposed k-nearest neighbor permits for the development of expressive but compact grid representations.
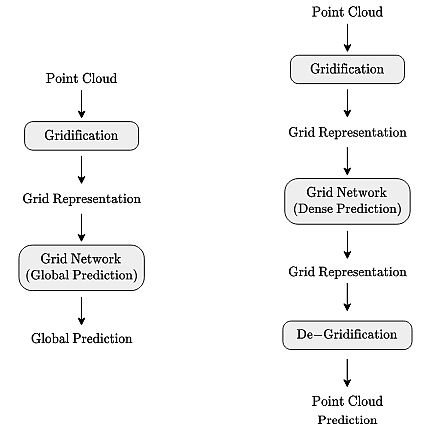
- To guage their method, researchers analyzed the expressive capability of gridification and de-gridification on a toy level cloud reconstruction process.
- Subsequently, they constructed gridified networks and utilized them to classification and segmentation duties.
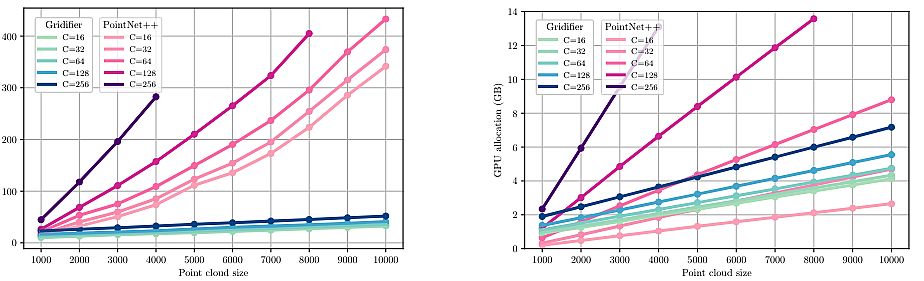
- They deployed gridified networks on ModelNet40: an artificial dataset for 3D form classification, consisting of 12,311 3D meshes of objects belonging to 40 lessons.
- They proved that gridified networks scale extra favorably than native level cloud strategies.
- Lastly, they analyzed the computational and reminiscence complexity of their gridified community by evaluating it with theoretical analyses.
Purposes of Level Clouds
Level cloud expertise has change into a state-of-the-art device with a variety of functions in a number of industries lately. It includes the gathering of information factors in a three-dimensional area, i.e. extremely detailed representations of real-world environments.
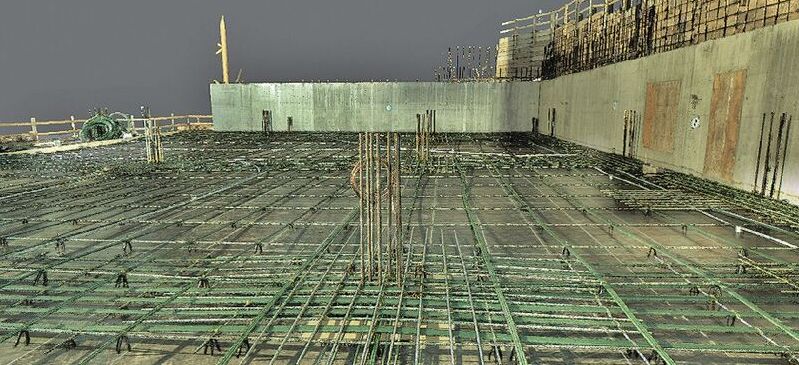
Structure and Development
Architects, builders, and designers can exactly measure the location and plan the mission with the assistance of level cloud modeling. All staff members have entry to the data required to develop the mission, thus enhancing communication and cooperation.
Development companies make the most of level clouds to put the premise for a constructing design. By utilizing level clouds they create a 3D mannequin of the previous constructing, akin to a historic website that requires explicit consideration.
3D Mapping and City Planning
Level cloud expertise additionally reworked conventional mapping and concrete planning. By capturing tens of millions of units of information factors with laser scanners or photogrammetry, it allows the creation of extremely correct 3D maps of landscapes, buildings, and infrastructure.
Level cloud knowledge produce 3D fashions of all of the buildings, roads, and different options in cities. They specify the places of objects and their heights. It seems like having a blueprint for metropolitan areas, and it helps plan how cities evolve.
Digital Actuality and Augmented Actuality
Digital actuality (VR) and augmented actuality (AR) immersive experiences make the most of level cloud knowledge intensively. Customers can discover digital environment with distinctive realism by incorporating level cloud fashions into VR/AR settings.
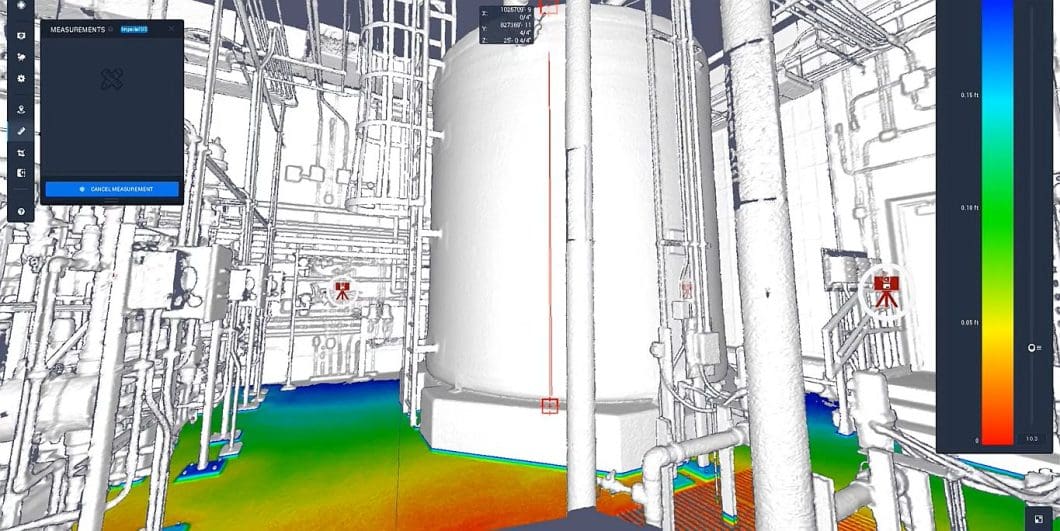
High quality Management and Business Inspection
In an industrial atmosphere, level cloud era has an essential function in inspection and high quality management processes. By capturing correct 3D representations of manufactured objects, it allows exact measurements, defect detection, and structural evaluation.

Level clouds allow the identification of security dangers, proactive security administration, aiding with security in development operations, recognition of development machines’ blind spots, and so on.
Robotics and Autonomous Automobiles
The event of robotic techniques and autonomous autos (AVs) relies upon closely on level cloud expertise. LiDAR sensors let autonomous autos (AVs) scan and navigate advanced environments. They make the most of level cloud knowledge to determine obstacles, decide the perfect route, and forestall collisions.
Abstract
The purpose of level cloud expertise is to allow firms within the industrial sector to gather knowledge easily. With the usage of this expertise, the groups shorten their mission cycle occasions and get high-quality, sooner outcomes. Subsequently, it offers nice benefits and advantages in finishing up many engineering tasks.
Learn our different fascinating blogs listed beneath: