

Sooner R-CNN is a two-stage object detection algorithm. It makes use of a Area Proposal Community (RPN) and Convolutional Neural Networks (CNNs) to establish and find objects in complicated real-world photos.
Developed by Shaoqing Ren, Kaiming He, Ross Girshick, and Jian Solar in 2015, this mannequin builds upon its predecessors, R-CNN and Quick R-CNN. In comparison with its predecessors, this one is extra environment friendly and correct in figuring out objects inside photos. The revolutionary structure and coaching means of Sooner R-CNN made it a cornerstone in pc imaginative and prescient purposes, from autonomous driving to medical imaging.
You’ll study the next ideas on this article:
- Foundational ideas of CNNs
- Evolution from R-CNN to Quick R-CNN
- Key parts and structure of Sooner R-CNN
- Coaching course of and techniques
- Group initiatives and challenges
- Enhancements and variants of Sooner R-CNN
About us: viso.ai supplies Viso Suite, the world’s solely end-to-end Pc Imaginative and prescient Platform. The know-how permits international organizations to develop, deploy, and scale all pc imaginative and prescient purposes in a single place. Get a demo.
Background Information of Sooner R-CNN
To study Sooner R-CNN, we should first undergo these ideas that led to its growth.
Convolution Neural Community (CNN)
A Convolutional Neural Community is a kind of deep neural community that detects objects within the picture. The primary parts on this CNN structure are as follows:
- Convolutional layers: These are the first constructing blocks of a community. Every convolutional layer applies a number of filters to the enter. These filters extract function maps from single picture enter.
- Activation features: Principally, they’re ReLU (Rectified Linear Unit) and add nonlinearity to the community in order that it might probably catch complicated patterns.
- Pooling layers: These layers down-sample function maps in spatial dimensions. Probably the most regularly used method is max pooling.
- Totally related layers: They’re typically positioned on the finish of the community and work together with every of them to offer a closing choice whereas accumulating international data.
- Output layer: That is the ultimate layer that produces the community output and typically, applies softmax activation to categorise.
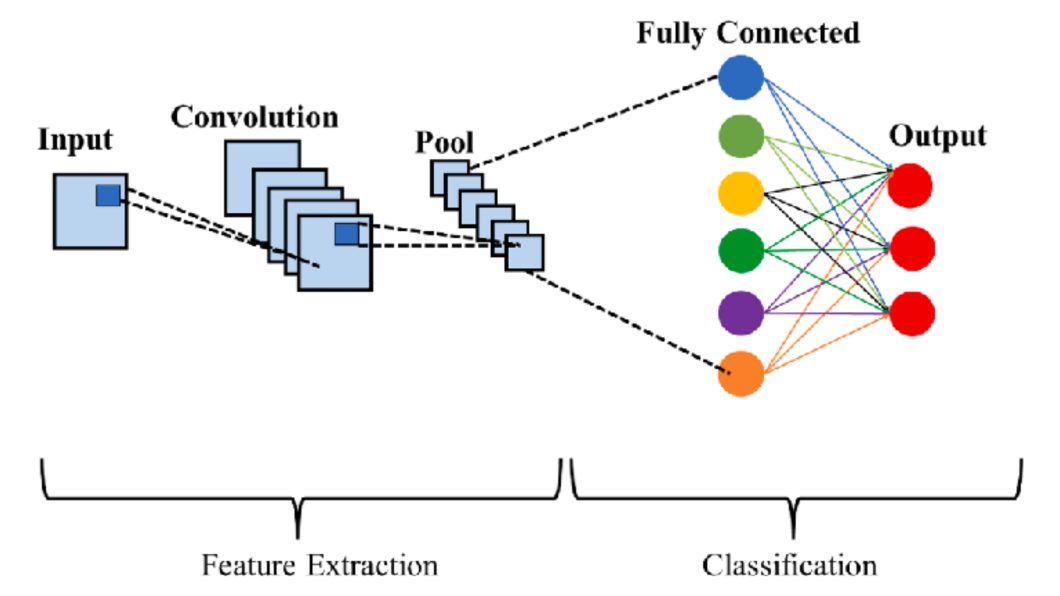
The layers of the CNN structure work in a feed-forward method to carry out the desired duties on information. At every stage, the enter is reworked right into a extra summary and composite illustration than the earlier stage. This makes it significantly appropriate to be used in purposes equivalent to picture recognition, object identification, and segmentation.
R-CNN
The primary profitable mannequin to use CNNs in object detection duties was the Area-based Convolutional Neural Community (R-CNN).
The R-CNN pipeline works in such a approach that the enter picture goes by pre-processing till proposals in numerous areas are generated. Every proposal is resized and handed by the CNN for function extraction. These options are then used to infer the thing’s presence and sophistication of curiosity from the Help Vector Machines (SVMs) classifiers. Lastly, the bounding field regressor fine-tunes the places of the objects.
Right here is the R-CNN structure delineating the way it processes enter photos for object detection duties:
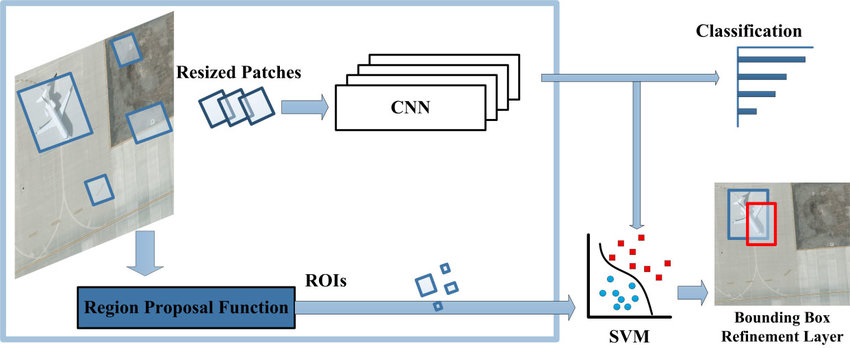
Whereas R-CNN was a giant growth in object detection, it had some massive shortcomings; most notably, being gradual since every of the area proposals wanted to be run independently by the CNN. This set the stage for improved variations, equivalent to Quick R-CNN and Sooner R-CNN.
Quick R-CNN
Quick R-CNN addresses a lot of R-CNN’s limitations. As an alternative of processing every area proposal individually, Quick R-CNN applies the CNN to your complete picture without delay. It then makes use of a Area of Curiosity (RoI) pooling layer to extract fixed-size function maps for every proposal from the CNN’s output. These options move by totally related layers for classification and bounding field regression.
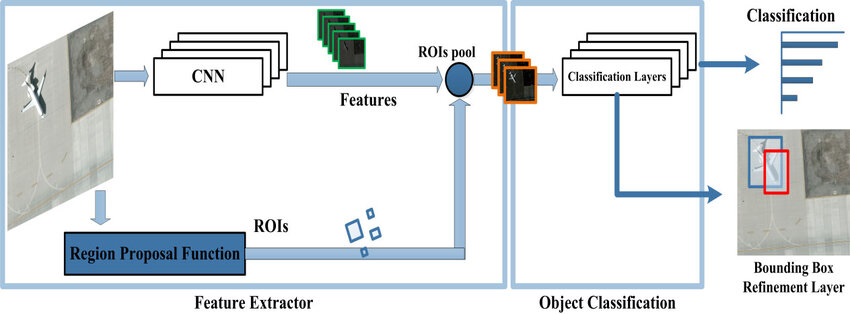
This method considerably hurries up each coaching and inference in comparison with R-CNN. Nonetheless, Quick R-CNN nonetheless depends on exterior area proposal strategies, which stay a bottleneck within the detection pipeline.
Key Parts of Sooner R-CNN
Sooner R-CNN builds upon the success of Quick R-CNN by introducing a novel element: the Area Proposal Community (RPN). RPN permits the mannequin to generate its personal area proposals, creating an end-to-end trainable object detection system. Let’s discover the important thing parts that make Sooner R-CNN so efficient.
Spine Community
The spine community acts because the function extractor for Sooner R-CNN. Typically, it is a pre-trained Convolutional Neural Community, for instance, ResNet and VGG. This community processes your complete enter picture to get a wealthy function map that subsequently encodes the hierarchical visible data.
This output of the spine community is a function map of a spatially smaller measurement than the enter picture and with a deeper channel measurement. This compacted type accommodates very high-level semantic data, which is very important for each area proposal and object classification duties.
Area Proposal Community (RPN)
RPN is the center of the Sooner R-CNN. It’s a totally convolutional community. The enter of RPN is the function map produced by the spine community. The method of producing area proposals is achieved by sliding a small community over the function map.
At every location of a sliding window, it predicts a number of area proposals, every having a classification rating. This rating signifies how probably an object is perhaps current within the enter picture.
RPN introduces the idea of anchors, predefined bins of assorted scales, and side ratios centered at every location within the function map.
For every anchor, the RPN predicts two issues:
- An “objectness or classification” rating signifies the chance that the anchor accommodates an object of curiosity.
- Bounding field refinements, that are changes to the anchor’s coordinates to raised match the thing.
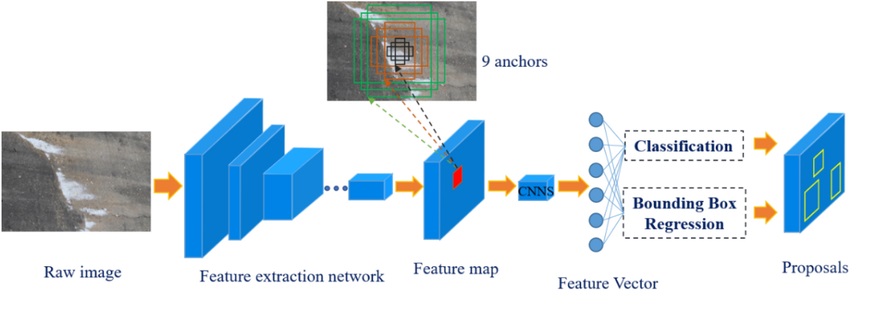
RPN achieves this by sliding a small community over the function map. At every sliding window location, it predicts a number of area proposals concurrently. This design permits the RPN to be computationally environment friendly whereas producing proposals at a number of scales and side ratios.
RoI Pooling Layer
The Area of Curiosity (RoI) pooling layer is essential for dealing with the variable sizes of area proposals. It takes fixed-size function maps from the area proposals no matter their authentic measurement and/or side ratio.
In different phrases, RoI pooling divides every of the area proposals into a hard and fast grid, say 7×7, after which performs a max-pool over options residing in every of the grid cells. This operation outputs a fixed-sized function map for every proposal, usually having dimensions equivalent to 7x7x512.
On this method, RoI pooling permits Sooner R-CNN to function over a number of area proposals with totally different sizes in a computationally environment friendly method. These fixed-size inputs additionally allow the totally related layers in a community to be current for the ultimate classification and regression.
Classification and Bounding Field Regression Heads
The final element of Sooner R-CNN is comprised of two parallel totally related layers:
- A classification head that predicts the category of the thing in every area proposal.
- A bounding field regression head that additional refines the coordinates of the detected object.
These heads act on the fixed-sized function maps which can be outputted by the RoI pooling layer.
The classification head, on this case, is a softmax activation that returns class chances for the proposals. By way of the bounding field regression head, we get refined coordinates per class, and this permits the community to foretell the bounding field accurately, lastly making the wanted adjustment.
The loss operate for coaching these heads combines cross-entropy loss for classification and easy L1 loss for bounding field regression. This method permits Sooner R-CNN to optimize concurrently over object classification accuracy and localization.
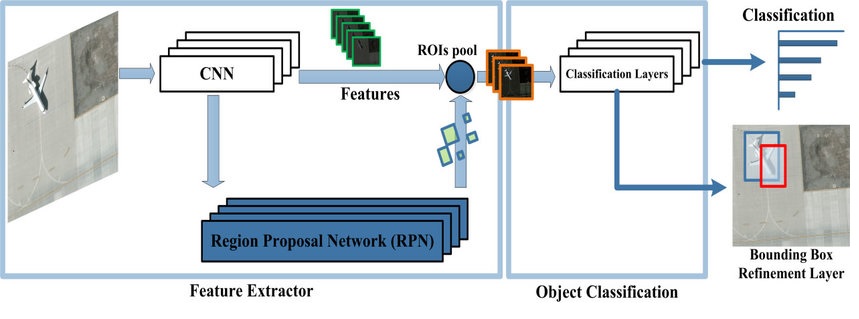
Structure of Sooner R-CNN
Sooner R-CNN unifies these parts right into a single community. An enter picture first goes by the spine CNN. The ensuing function map is fed into the RPN and ROI pooling layer. The RPN scans the given picture with totally different anchor bins and proposes areas by calculating scores, whereas the ROI pooling layers take these area proposals and carry out object classification.
A classification layer/head predicts the category of an object in every area proposal. The classification information is fed into the bounding field regression head, which performs additional regression of the coordinates and yields the ultimate detection output.
Coaching Course of
Coaching Sooner R-CNN requires cautious consideration because of its complicated structure. Researchers have give you a number of methods for coaching these fashions successfully.
A few of them are:
Alternating Coaching Technique
On this method, the RPN and detection community practice individually in alternating steps. First, we practice the RPN, after which its proposals are used to coach the detection community. Then, the detection community’s weights initialize a brand new RPN, which is fine-tuned. This course of can repeat for a number of iterations.
Approximate Joint Coaching
Approximate joint coaching streamlines the method even additional by coaching each networks concurrently. It treats RPN proposals as mounted to keep away from the complexity of backpropagating by the proposal era step. Whereas not actually end-to-end, this technique nonetheless inherits the advantages of being end-to-end with a clear and unified framework throughout testing.
Non-Approximate Joint Coaching
This method goals at true end-to-end coaching; gradients must move by your complete community, together with the proposal era step. This step is extra theoretically right, however extra computationally costly and difficult to implement successfully.
Group Initiatives of Sooner R-CNN
The affect of Sooner R-CNN goes past educational analysis. The Sooner R-CNN mannequin has been embraced by the pc imaginative and prescient group, leading to many implementations and purposes. Effectively-developed open-source programming languages such because the Tensorflow and Pytorch present implementations of Sooner R-CNN making it accessible for builders and researchers all around the world.
At present, Sooner R-CNN will be carried out in quite a few domains within the following points. Autonomous driving assists the car to establish objects on the highway. The know-how is utilized in medical imaging to assist diagnose illnesses based mostly on figuring out abnormalities in X-rays and MRIs.
Some widespread makes use of embody the administration of shares in retail firms and self-checkout techniques. These purposes display the power and effectivity of the algorithm in numerous eventualities. Right here is among the instance group initiatives.
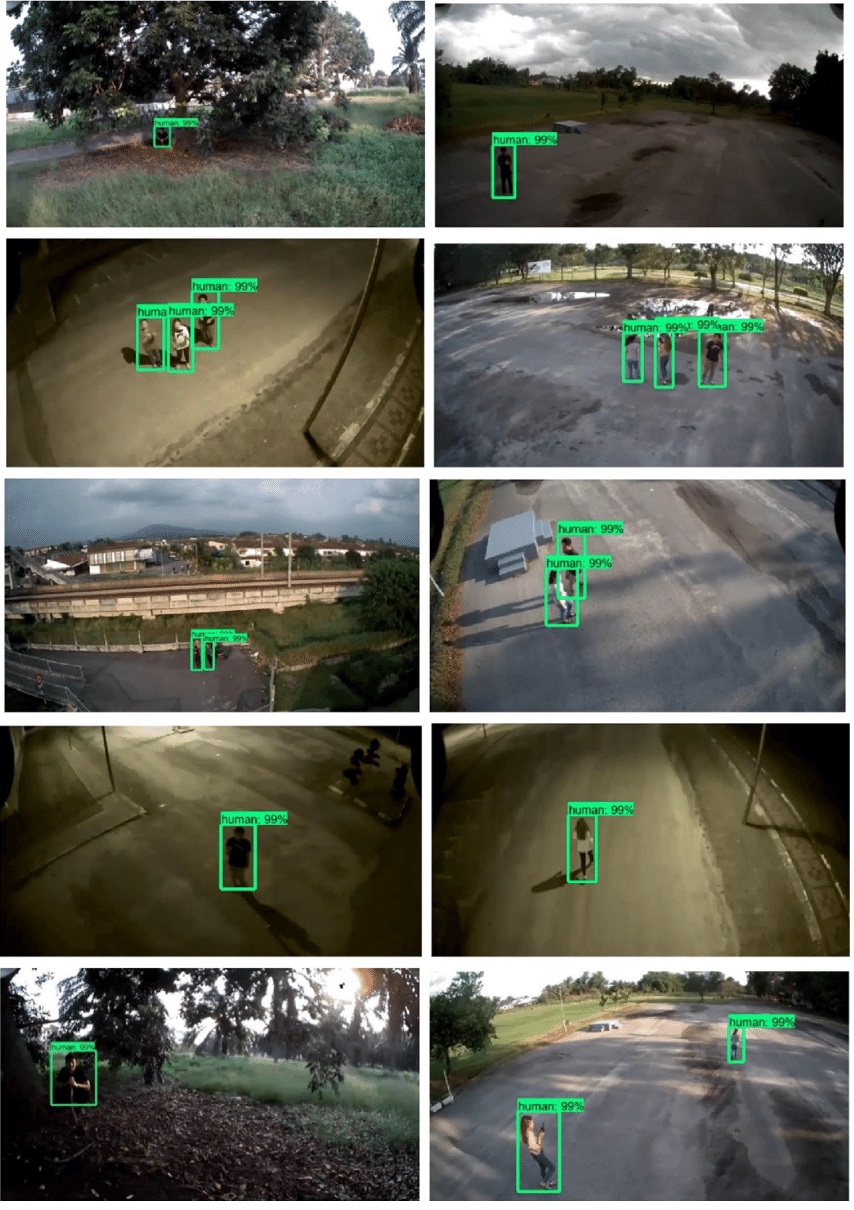
Sooner R-CNN for Pedestrian Detection from Drone Pictures
Pedestrian detection from drone photos is vital in search and rescue, surveillance, and infrastructure monitoring. It poses challenges due to variations in place and the course of photographs, distances, lighting, climate, and background complexity. Current deep studying fashions, significantly Sooner R-CNN, exhibit nice success in object detection duties.
Primarily based on this group mission, drone photos can detect pedestrians, with the assistance of Sooner R-CNN. The Sooner R-CNN integrates a spine community for function map extraction, an RPN for the era of every area proposal, and a detection community for refining proposals and classifying objects.
The mannequin trains on a dataset of 1500 photos. The photographs are taken by an S30W drone underneath numerous circumstances, together with totally different places, viewpoints, and each daytime and nighttime settings.
Experimental Outcomes
These are the mannequin efficiency outputs:
- Precision: 98%
- Recall: 99%
- F1 Measure: 98%
These outcomes counsel that Sooner R-CNN is efficient in recognizing pedestrians from drone photos with excessive ranges of accuracy and resilience.
The findings of this examine point out that Sooner R-CNN is promising for pedestrian detection in numerous settings and will, due to this fact, be priceless in sensible purposes. Future work may enhance the reliability of the outcomes underneath totally different circumstances or examine on-line monitoring on drones.
Challenges of Sooner R-CNN
Nonetheless, Sooner R-CNN has some points. The mannequin can have difficulties with small objects or these with uncommon side ratios. It additionally has issue with closely occluded objects or these in cluttered scenes. The computational necessities, whereas improved from earlier fashions, can turn out to be a difficulty for real-time processing for resource-constrained gadgets.
Enhancements and Superior Variants of Sooner R-CNN
There are nonetheless some limitations in Sooner R-CNN and researchers develop quite a lot of variations from its foundation. Allow us to take into account some important enhancements and variants.
Characteristic Pyramid Community (FPN)
FPN improves the Sooner R-CNN community in detecting objects at totally different scales. It generates the pyramid of the function map, which permits the mannequin to establish small objects from detailed options and huge objects from the summary options. This multi-scale method helps in rising the detection accuracy, particularly for small objects.
It improves Sooner R-CNN by:
- Making a top-down pathway that mixes high-level semantic options with low-level fine-grained options.
- Enabling the community to detect objects throughout a variety of scales extra successfully.
- Bettering efficiency on small object detection
- Sustaining computational effectivity regardless of the added complexity.
Masks R-CNN
Masks R-CNN, an extension of Sooner R-CNN, is able to occasion segmentation along with object detection. It incorporates a department for segmenting the masks on all the anticipated ROIs. This extension permits Masks R-CNN not just for detection but in addition to detect the boundaries of particular objects as nicely.
Key enhancements embody:
- Including a department for predicting segmentation masks on every Area of Curiosity (RoI).
- Introducing RoIAlign, which replaces RoIPool to protect spatial data extra precisely.
- Bettering total detection accuracy because of the multi-task coaching (detection and segmentation).
- Enabling pixel-level segmentation, offering extra detailed object data.
Cascade R-CNN
Cascade R-CNN addresses the issue of the inconsistency of the IoU threshold for coaching and inference of the thing detection system. It makes use of a sequence of detectors with rising IoU thresholds. It helps refine predictions at every stage. This cascade of classifiers enhances localization accuracy, particularly regarding high-quality detections.
Its enhancements embody:
- Implementing a cascade of detectors educated with rising IoU thresholds.
- Steadily refining detection outcomes by a number of levels.
- Considerably enhancing detection accuracy, particularly for high-quality (excessive IoU) detection.
- Enhancing efficiency on difficult datasets with strict analysis metrics.
All these architectures have improved the cutting-edge in object detection and occasion segmentation, constructing upon the stable basis developed by Sooner R-CNN. They tackle totally different limitations of the unique mannequin, from multi-scale detection to pixel-level segmentation and high-quality object localization.
What’s Subsequent?
The sphere of object detection continues to evolve, with researchers exploring new architectures, loss features, and coaching methods. Future developments could probably give attention to enhancing real-time detection capabilities, dealing with numerous object classes, and integrating with multimodal information.
Should you loved studying this text, we now have another suggestions for you too:
Regularly Requested Questions (FAQs)
Q1. How can I enhance my R-CNN efficiency quick?
A. You possibly can implement the next strategies to enhance your R-CNN efficiency:
- Improve dataset measurement
- Optimize hyperparameters
- Use a strong spine community like ResNet or EfficientNet
- Implement ensemble strategies by combining predictions from a number of R-CNN fashions
- Use pre-trained fashions on massive datasets
- Regulate anchor field sizes and side ratios to match your dataset
- Implement dropout or L1/L2 regularization to stop overfitting and enhance generalization
Q2. What are the trade-offs between detection pace and accuracy in Sooner R-CNN?
A. In Sooner R-CNN, accuracy improves with complicated backbones, larger resolutions, and extra proposals, however at the price of slower detection speeds. For instance, rising the variety of proposals can enhance accuracy however lower pace because of the larger computational value of processing extra area proposals. Due to this fact, detection pace will increase with easier fashions, decrease picture resolutions, and fewer area proposals. Balancing these elements is vital.
Q3. How do you deal with various side ratios and scales in Sooner R-CNN?
A. In Sooner R-CNN, various side ratios and scales are dealt with by RPN and RoI Align. RPN makes use of anchor bins with totally different scales and side ratios to detect objects of variable configurations and dimensions. In the meantime RoI Align ensures exact alignment of proposals. Due to this fact, it helps in accommodating totally different side ratios and scales for correct bounding field predictions.
This autumn. Is Yolo higher than Sooner R-CNN?
A. In comparison with Sooner R-CNN, YOLO is educated end-to-end therefore it’s extra environment friendly and sooner on the object detection activity. Each of the algorithms are fairly exact; nevertheless, on the subject of comparability it has been noticed that YOLO surpasses Sooner R-CNN by way of accuracy, pace, and real-time efficiency as nicely.
Q5. How do you deal with the category imbalance downside in Sooner R-CNN?
A. There are a number of methods of coping with class imbalance equivalent to onerous unfavourable mining, balancing the variety of constructive and unfavourable samples throughout the coaching, and using class-specific loss features within the coaching processes.